
Page 18 - RAC_CIAW_ a_I_n_01_2021.pdf
P. 18
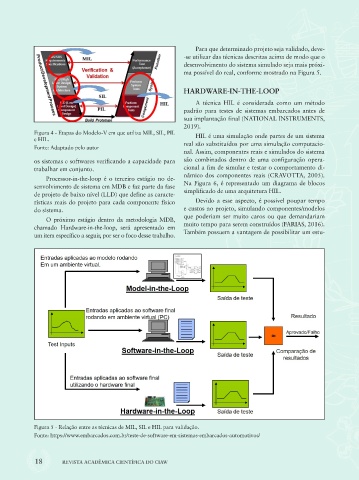
Para que determinado projeto seja validado, deve-
-se utilizar das técnicas descritas acima de modo que o
desenvolvimento do sistema simulado seja mais próxi-
ma possível do real, conforme mostrado na Figura 5.
HARDWARE-IN-THE-LOOP
A técnica HIL é considerada como um método
padrão para testes de sistemas embarcados antes de
sua implantação final (NATIONAL INSTRUMENTS,
2019).
Figura 4 - Etapas do Modelo-V em que utiliza MIL, SIL, PIL HIL é uma simulação onde partes de um sistema
e HIL.
Fonte: Adaptado pelo autor real são substituídos por uma simulação computacio-
nal. Assim, componentes reais e simulados do sistema
os sistemas e softwares verificando a capacidade para são combinados dentro de uma configuração opera-
trabalhar em conjunto. cional a fim de simular e testar o comportamento di-
nâmico dos componentes reais (CRAVOTTA, 2005).
Processor-in-the-loop é o terceiro estágio no de-
senvolvimento de sistema em MDB e faz parte da fase Na Figura 6, é representado um diagrama de blocos
de projeto de baixo nível (LLD) que define as caracte- simplificado de uma arquitetura HIL.
rísticas reais do projeto para cada componente físico Devido a esse aspecto, é possível poupar tempo
do sistema. e custos no projeto, simulando componentes/modelos
que poderiam ser muito caros ou que demandariam
O próximo estágio dentro da metodologia MDB,
chamado Hardware-in-the-loop, será apresentado em muito tempo para serem construídos (FARIAS, 2016).
um item específico a seguir, por ser o foco desse trabalho. Também possuem a vantagem de possibilitar um estu-
Figura 5 - Relação entre as técnicas de MIL, SIL e HIL para validação.
Fonte: https://www.embarcados.com.br/teste-de-software-em-sistemas-embarcados-automotivos/
18 REVISTA ACADÊMICA CIENTÍFICA DO CIAW